基金项目:国家“863”计划项目(2013AA040203);国家自然科学基金青年基金资助项目(51305045)
作者简介:崔 航,研究方向:机械电子工程 通讯作者:伍希志,博士,讲师;E-mail:wuxizhi2006@126.com
作者简介:崔 航,研究方向:机械电子工程 通讯作者:伍希志,博士,讲师;E-mail:wuxizhi2006@126.com
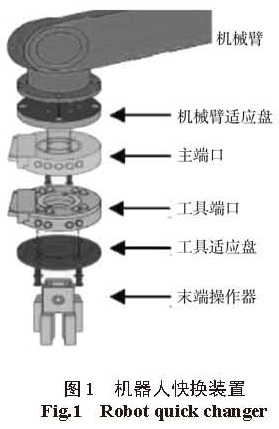
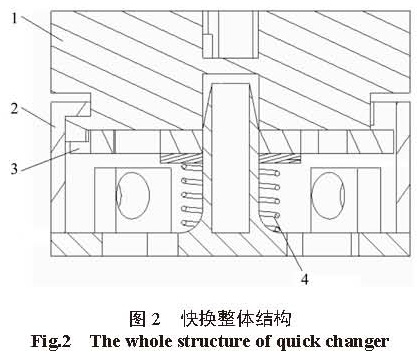
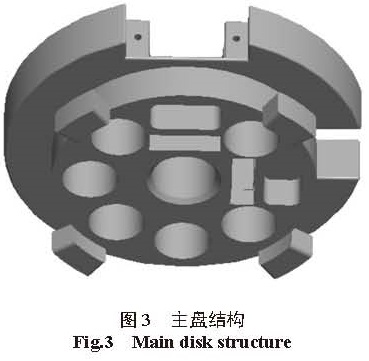
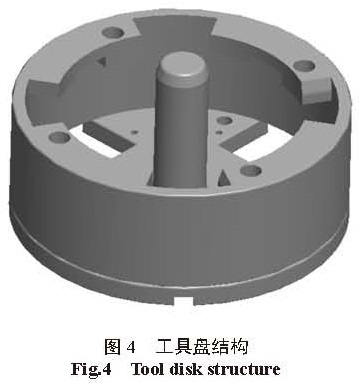
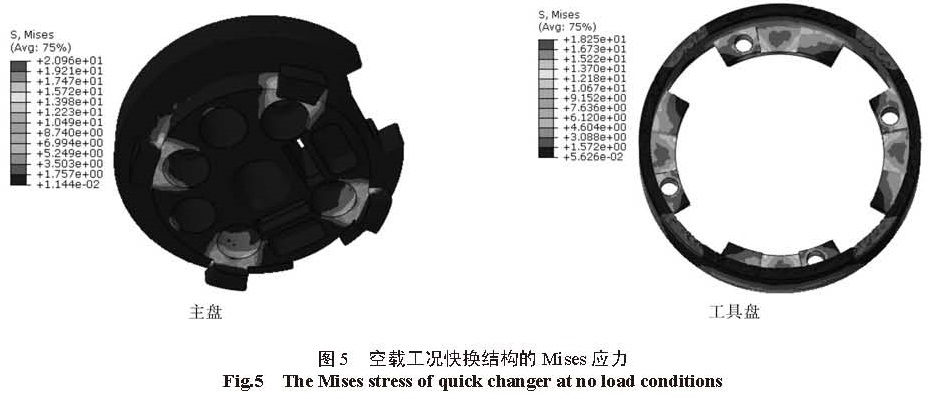
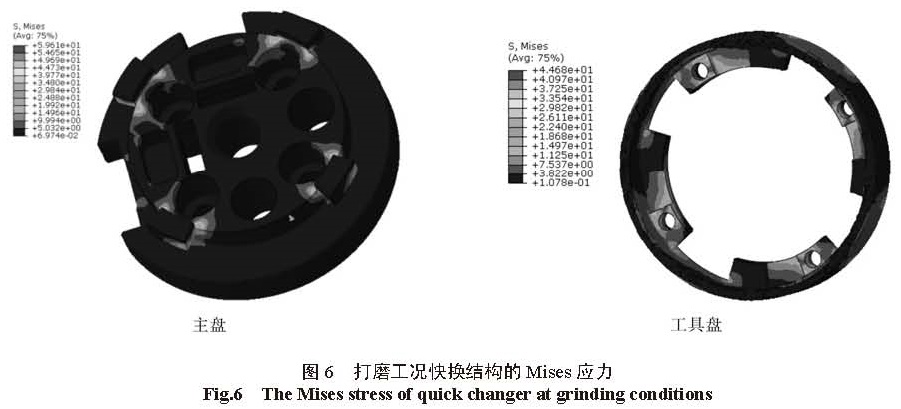
随着“中国制造2025”和智能制造的大力推进,越来越多家具企业开始采用机器人进行打磨。提供一种机器人末端执行器的全自动快换装置,首先根据快换装置的使用要求和关键性能,进行快换装置结构设计;然后采用有限元仿真对快换结构的两个典型工况进行强度校核,结果表明最大Mises 应力远小于材料许用应力,符合强度要求。该快换装置无需额外动力进行装配,且具有一定弹性,使机器人打磨家具时能更好地贴合打磨表面,提高打磨效果。
With the “Made in China 2025” and intelligent manufacturing vigorously promoting, more and more furniture companies began to use robots to polish. This paper presents a fully automatic quick-change device for the robot end actuator. Firstly, according to the requirements and key performance of the quick-change device, the structure design of the quick-change device is carried out. Then, strength test of the quick-change structure are carried out at two typical cases by finite element simulation. The results show that the maximum Mises stress is much smaller than the material allowable stress, consistent with the strength requirements. The quick-change device without additional power for assembly has a certain flexibility, so that it could be better fit the polished surface and improve the grinding effect at grinding furniture.

中南林业科技大学学报
《中南林业科技大学学报》原名《中南林学院学报》,是中南林业科技大学主办的以林为特色的自然科学学术期刊。该刊1981年创刊,2010变更为月刊,月底出版,国内外公开发行。国际刊号为ISSN 1673-923X,国内刊号为CN43-1470/S。该刊是教育部优秀科技期刊,全国优秀高校学报,湖南省一级期刊。是全国中文核心期刊,中国科学引文数据库来源期刊,中国精品科技期刊,中国科技核心期刊。该刊入编了国内所有的期刊数据库。
主要栏目:林学、生态学、生物科学与技术、植物学、园林、木材科学等。
读者对象:本刊适合于农林院校师生以及农林科研院所、农林管理部门和生产单位的科技和管理人员阅读,也适合于与以上学科和专业有关的其他高校师生和科技人员阅读。